
About Me

I am now a Ph.D. student in Robotics, Zhejiang University, working with Prof. Fei Gao.
I obtained my B.Eng. of Automation at Zhejiang University in 2022.
My research interests include representation learning and representation learning for robotics.
Now I am a research intern at Galbot, working with Prof. He Wang and Zhizheng Zhang.
I am always happy to chat or collaborate with people with different backgrounds. If you are interested in my work, please feel free to reach out!
My previous research mainly focuses on motion planning for multi-articulated robots and on uneven terrain.
- Google Scholar: CLICK HERE
- Twitter: CLICK HERE
- Email: xulon666@gmail.com
Honors and Awards
- 1st prize at RoboMaster 2022 University AI Challenge, 2022
- Zhejiang Government Scholarship (top 3%), 2020
- First Academic Scholarship (top 3%), 2019
Talks & Presentations
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Robots in Unstructured EnvironmentsIEEE International Conference on Robotics and Automation (ICRA), Vienna, Austria, Jun. 2026 |
|
SF-TIM: A Simple Framework for Enhancing Quadrupedal Robot Jumping Agility by Combining Terrain Imagination and MeasurementInternational Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, Oct. 2025 |
|
An Efficient Trajectory Planner for Car-like Robots on Uneven TerrainInternational Conference on Intelligent Robots and Systems (IROS), Detroit, USA, Oct. 2023 |
Researches
†Equal Contribution, *Project Leader

|
GIF: Agentic Generation of Interactive and Functional Object Compositions for Robot Learning
L. Xu†, Z. Zhang†, M. Yan†, S. Deng, C. Xia, M. Dong, J. Chen, J. Lyu, F. Gao, Z. Zhang, H. Wang Under review. Agentic pipeline for generating functional simulation-ready scenes from text, images, or assets. |
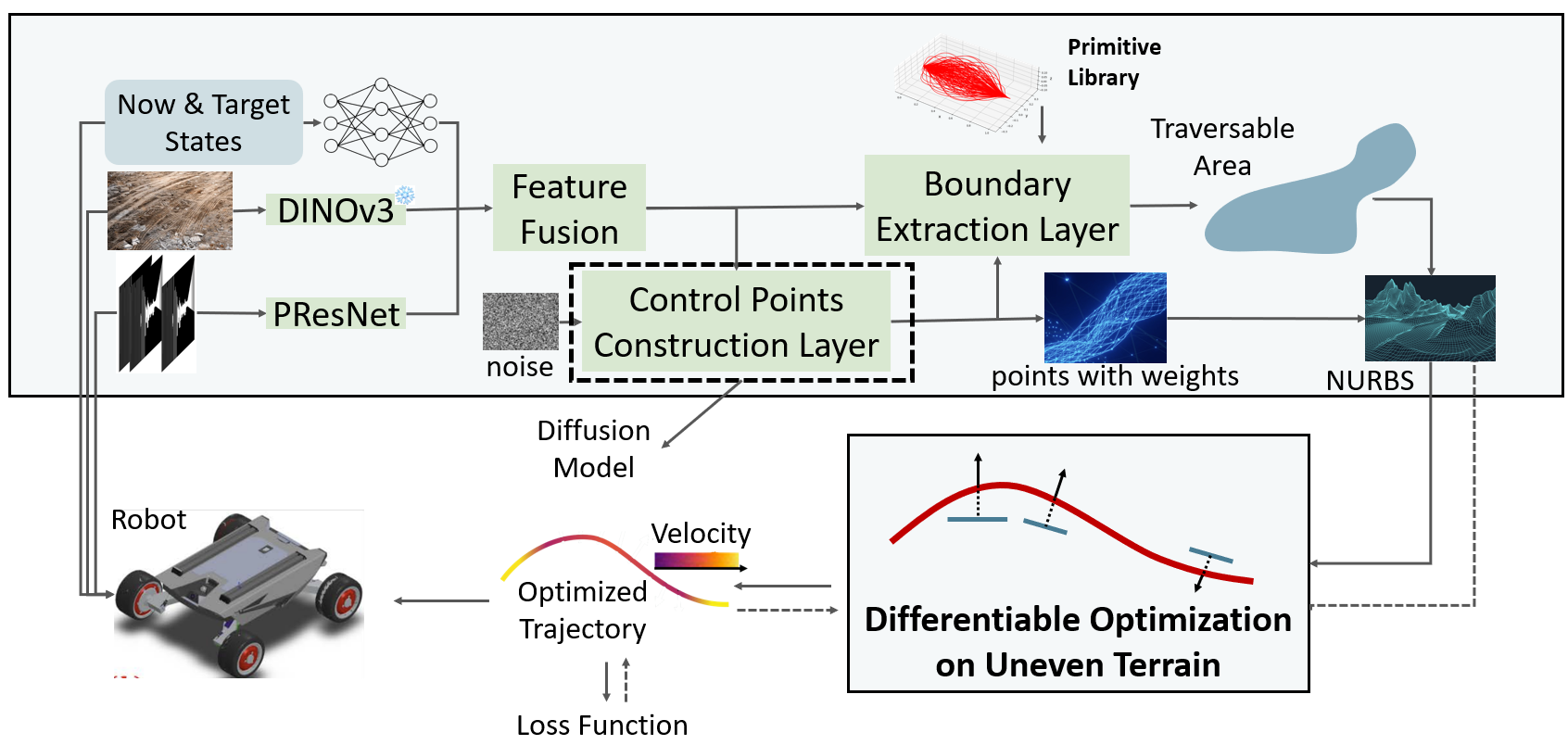 |
Learning Trajectory Generation on Uneven Terrain with Differentiable Trajectory Optimization and Manifold
Z. Hou†, L. Xu†, C. Wong†, Z. Wang, S. Tan, Z. Zhang, X. Zeng, Z. Wei, H. Wang, J. Hou, F. Gao Under review. Optimal and efficient trajecotory generation on uneven terrain with differentiable trajectory optimization and manifold. |
|
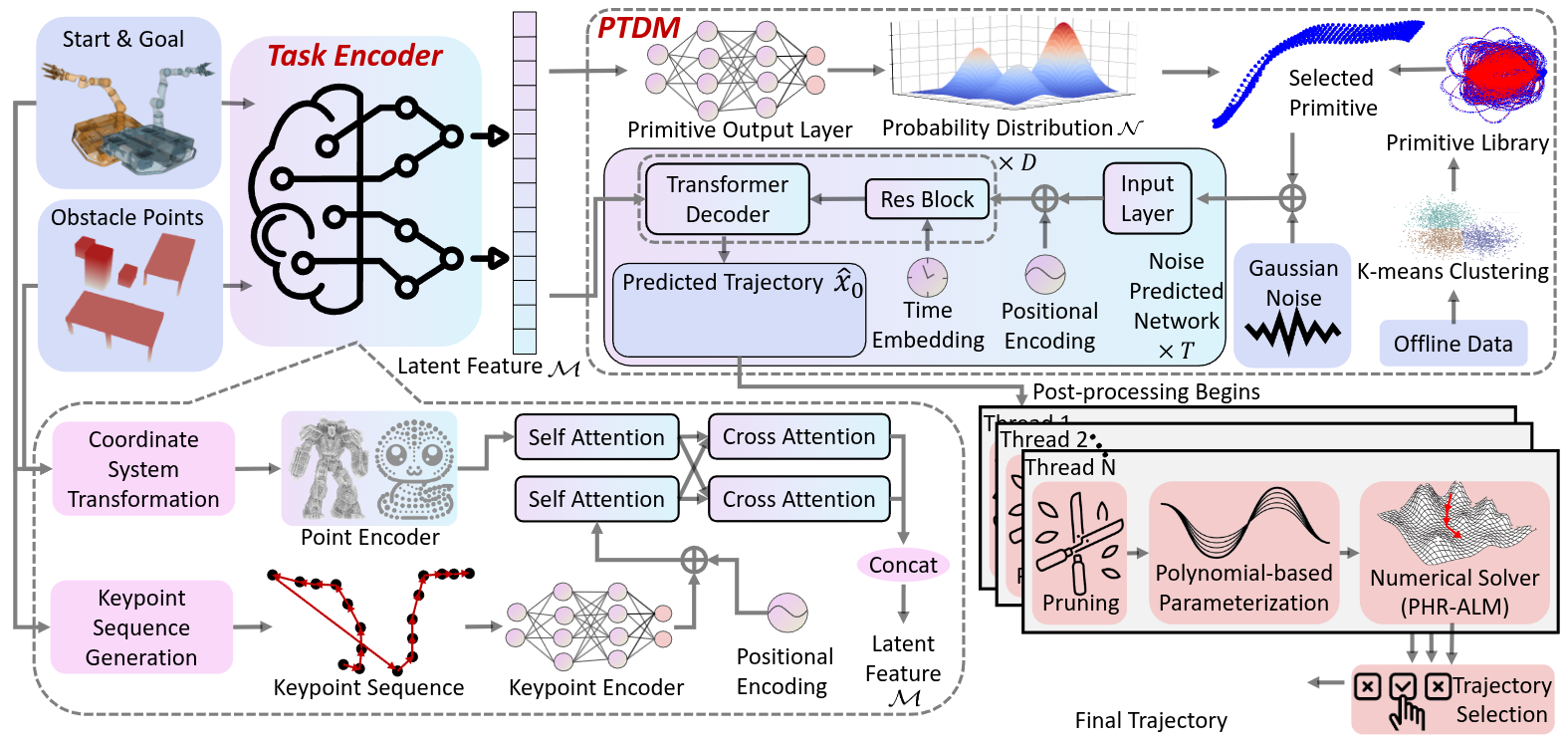
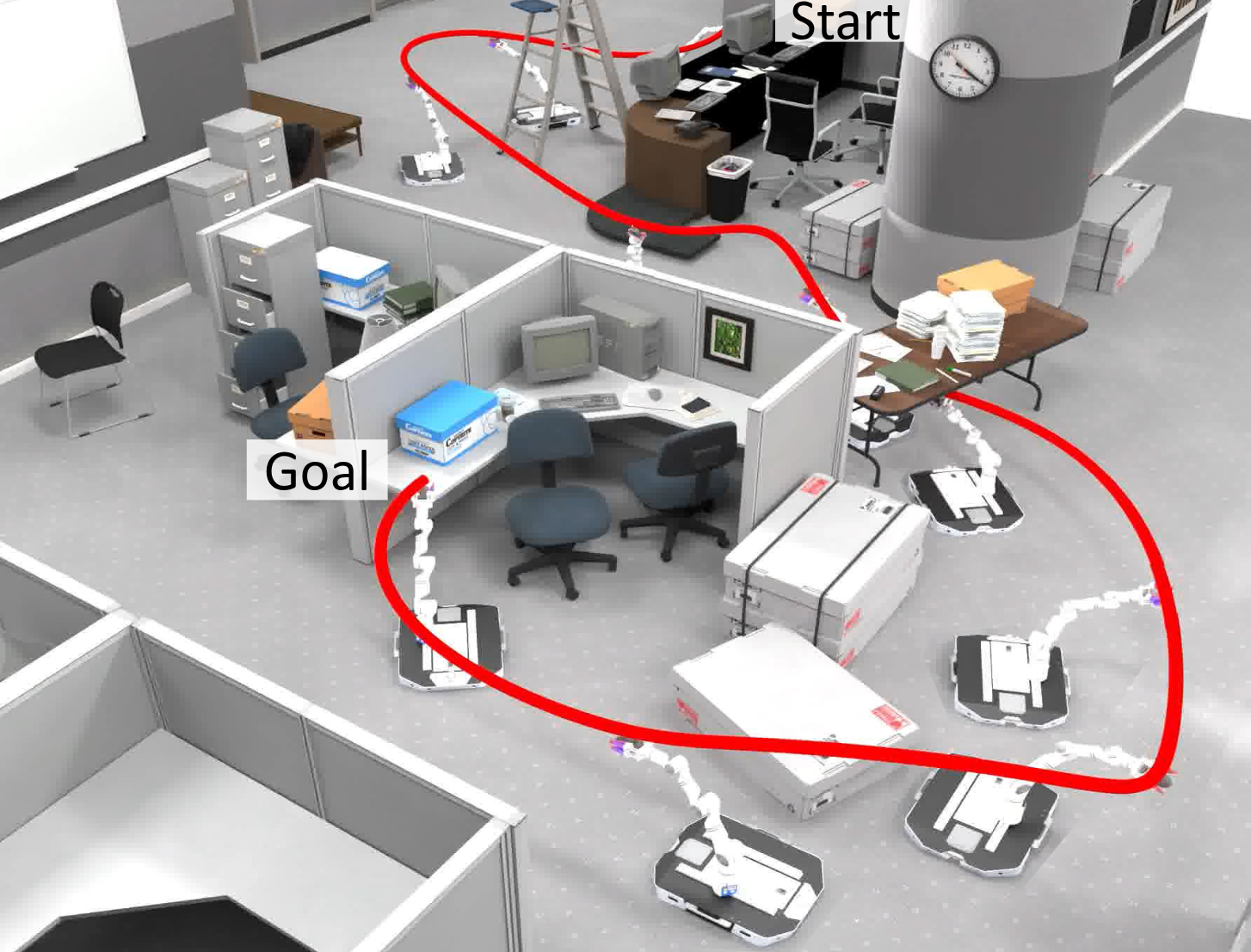
Primitive-based Truncated Diffusion for Efficient Trajectory Generation of Mobile Manipulators
L. Xu†, C. Wong†, Y. Zhong, J. Lin, J. Hou, F. Gao IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026 Paper / Code 
Diverse and efficient trajectory generation for mobile manipulator with primitive-based truncated diffusion. |
|
TopAY: Efficient Trajectory Planning for Differential Drive Mobile Manipulators via Topological Paths Search and Arc Length-Yaw Parameterization
L. Xu†, C. Wong†, M. Zhang, J. Lin, F. Gao IEEE International Conference on Robotics and Automation (ICRA), 2026 Paper / Code 
A classical trajectory planner for differential drive mobile manipulator. |
|
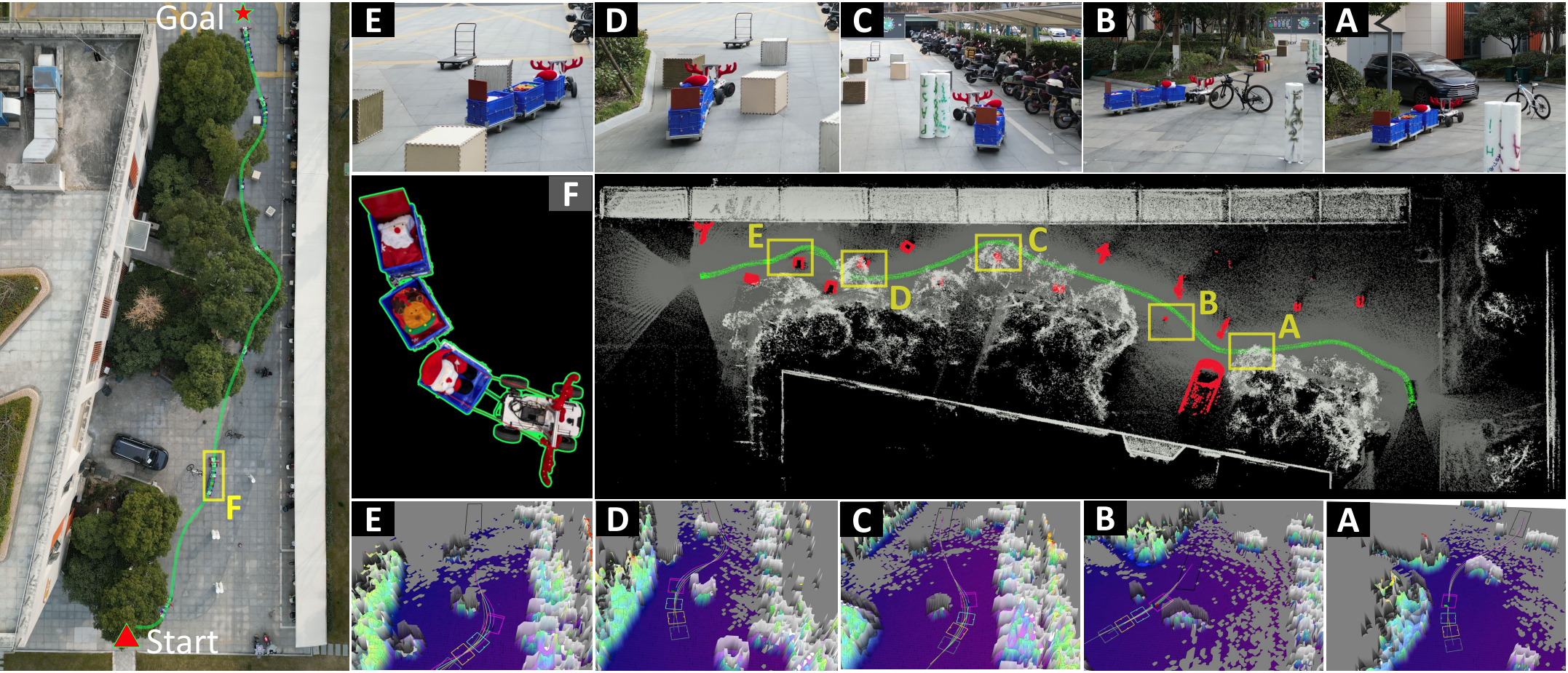
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Robots in Unstructured Environments
L. Xu, K. Chai, B. An, J. Gan, Q. Wang, Y. Zhou, X. Li, J. Lin, Z. Han, C. Xu, Y. Cao, F. Gao IEEE Transactions on Automation Science and Engineering (T-ASE), 2025 Paper / Video / Code 
A real-time trajectory planner for tractor-trailer robots in unstructured environments. |
|
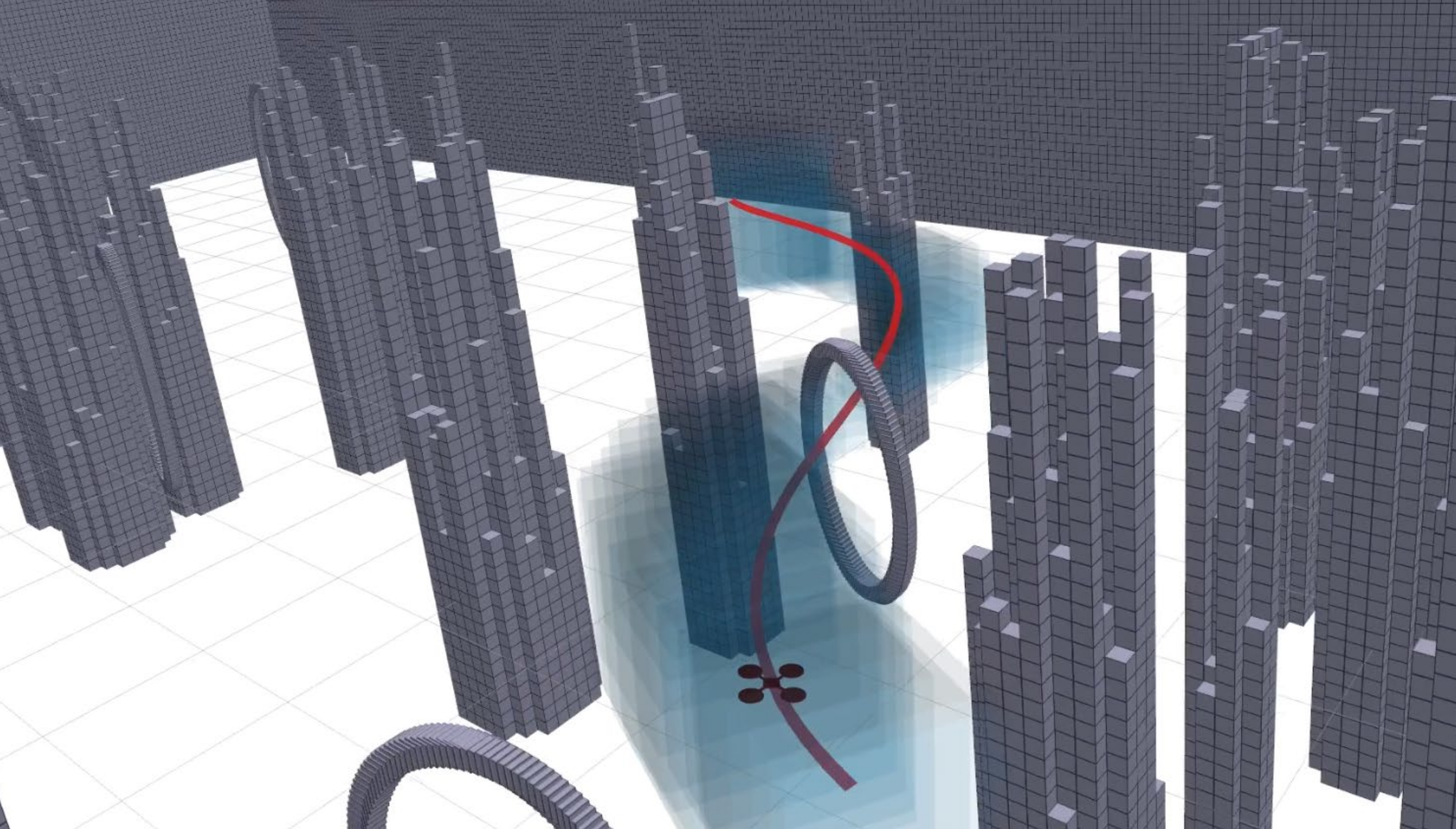
Dynamically Feasible Trajectory Generation with Optimization-Embedded Networks for Autonomous Flight
Z. Han†, L. Xu†, L. Pei, F. Gao IEEE Robotics and Automation Letters, 2025. Paper / Video / Web Differentiable optimization layer can contribute to end-to-end UAV trajectory generation. |
|
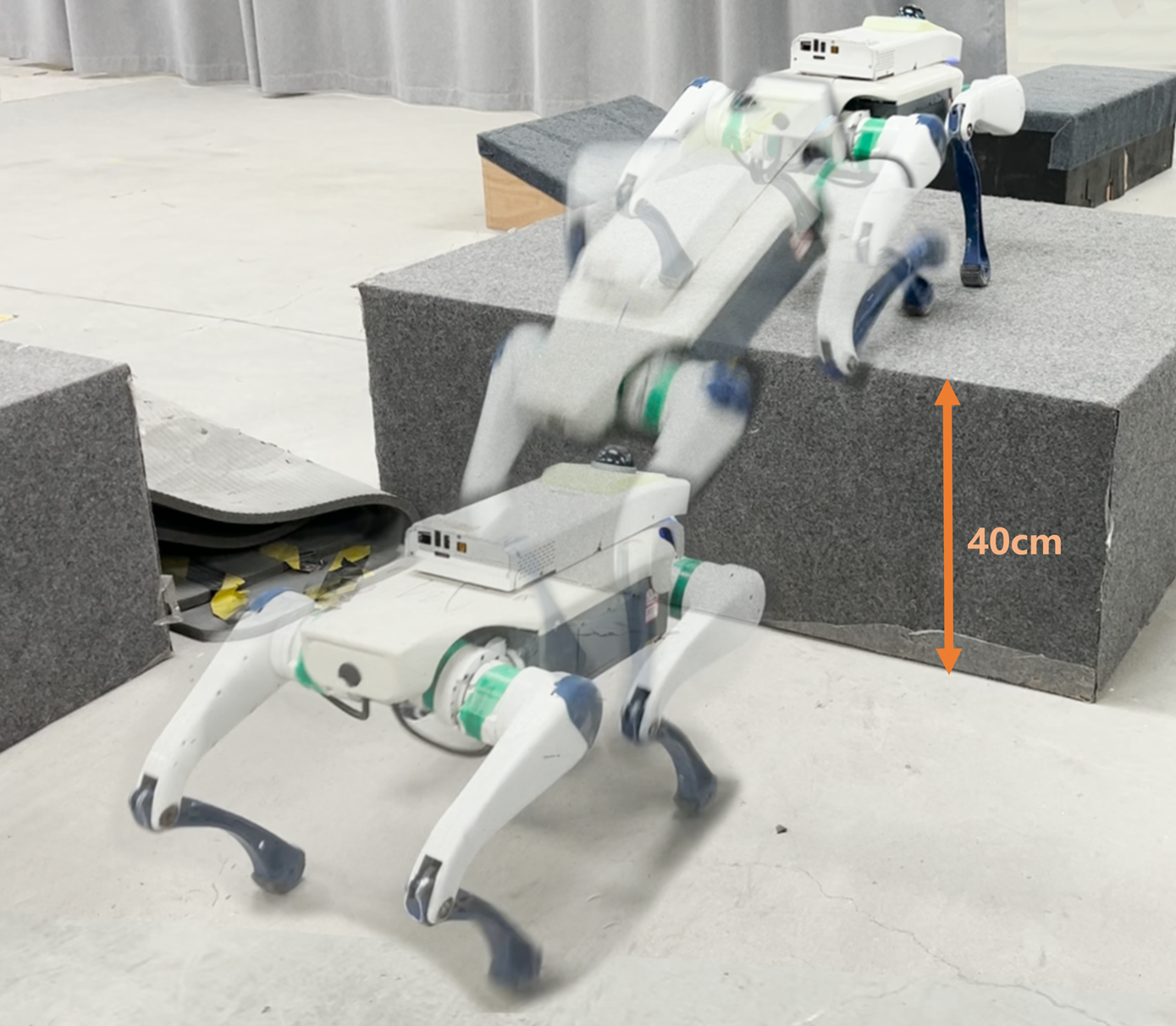
SF-TIM: A Simple Framework for Enhancing Quadrupedal Robot Jumping Agility by Combining Terrain Imagination and Measurement
Z. Wang, Y. Li, L. Xu*, H. Shi, Z. Ma, Z. Chu, C. Li, F. Gao, K. Yang, K. Wang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 Paper / Web A simple framework for enhancing quadrupedal robot jumping agility. |
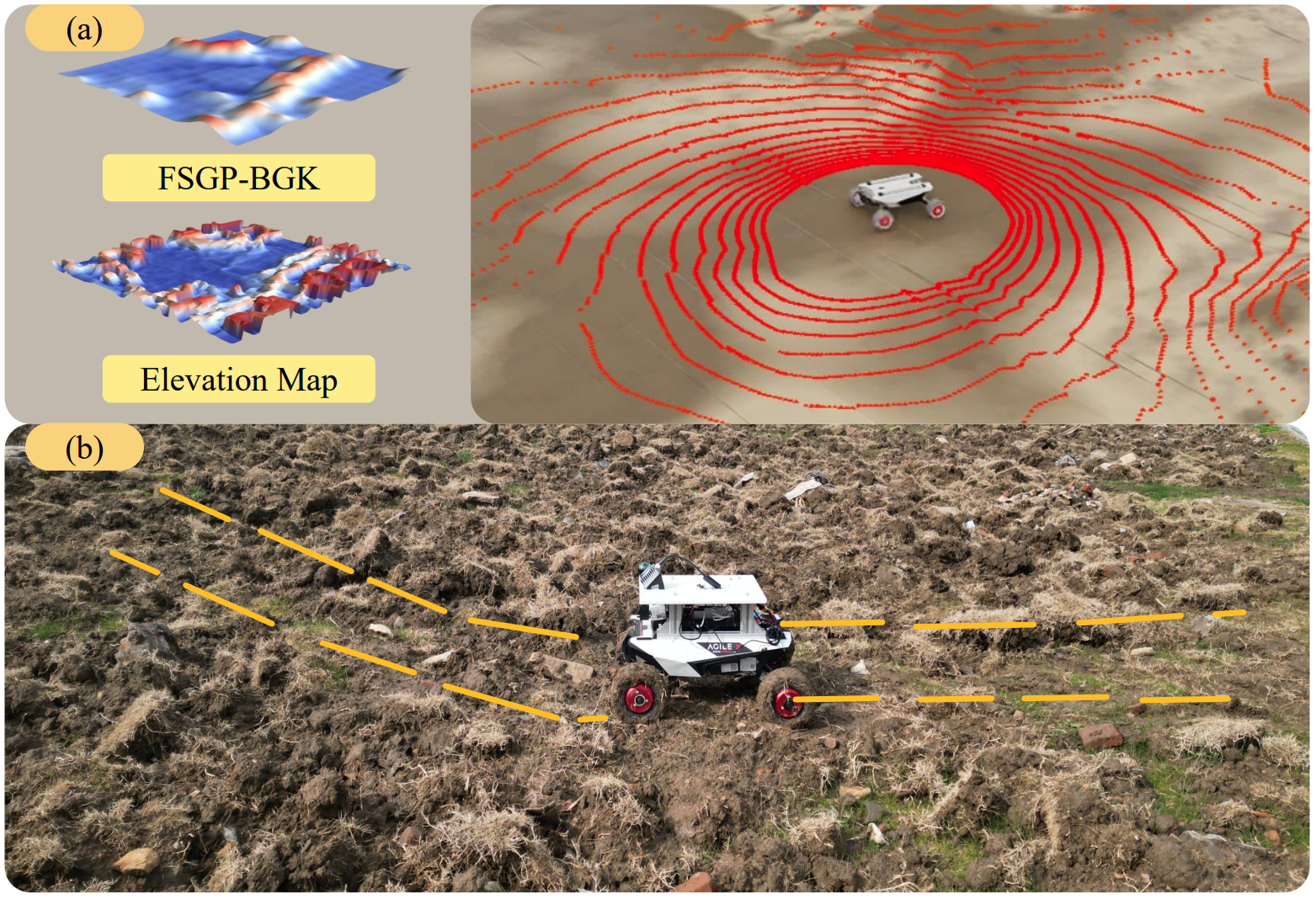 |
Real-time Spatial-temporal Traversability Assessment via Feature-based Sparse Gaussian Process
S. Tan†, Z. Hou†, Z. Zhang†, L. Xu*, M. Zhang, Z. He, C. Xu, F. Gao, Y. Cao IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 Paper / Code 
A real-time traversability assessment via feature-based sparse Gaussian process. |
|
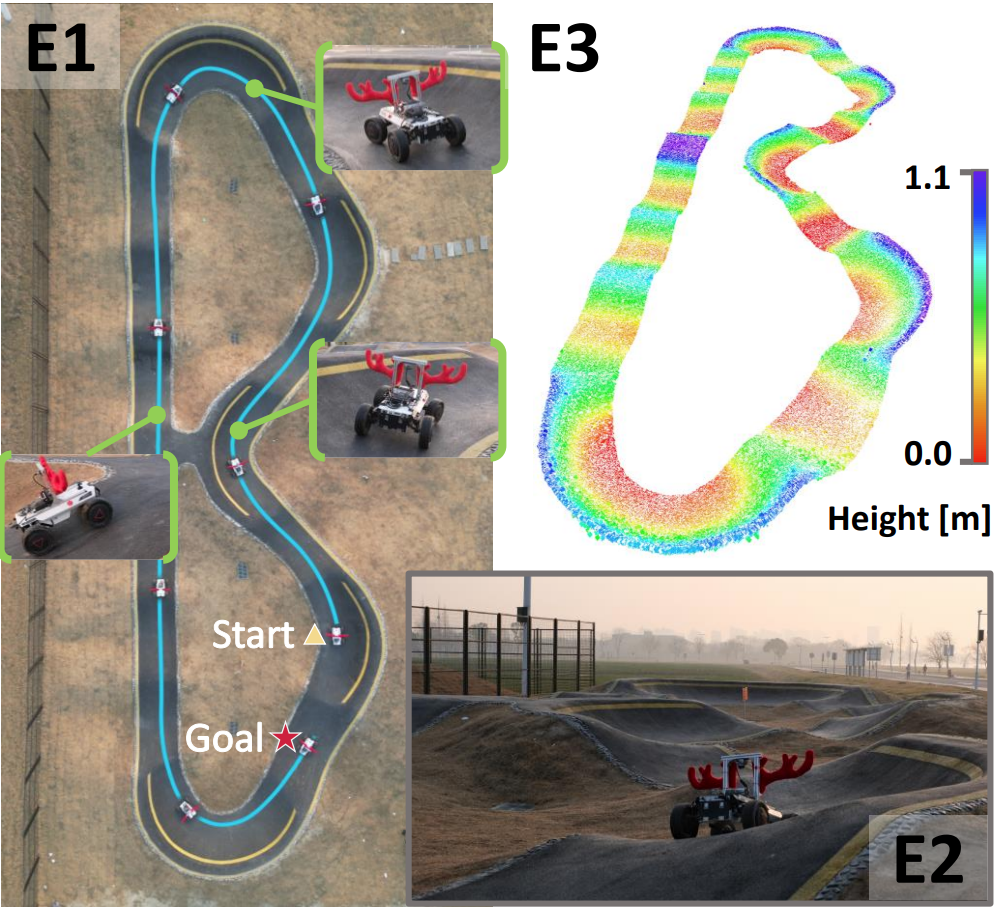
SEB-Naver: A SE(2)-based Local Navigation Framework for Car-like Robots on Uneven Terrain
X. Li†, L. Xu†, X. Huang†, D. Xue, Z. Zhang, Z. Han, C. Xu, Y. Cao, F. Gao IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 Paper / Video / Code 
Real-time SE(2)-based local navigation framework for car-like robots on uneven terrain. |

|
LF-3PM: a LiDAR-based Framework for Perception-aware Planning with Perturbation-induced Metric
K. Chai†, L. Xu†, Q. Wang, C. Xu, P. Yin, F. Gao IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 Paper / Video / Code 
Robots with limited FOV can avoid some localization-unfriendly space when navigation. |
|
An Efficient Spatial-Temporal Trajectory Planner for Autonomous Vehicles in Unstructured Environments
Z. Han†, Y. Wu†, T. Li, L. Zhang, L. Pei, L. Xu, C. Li, C. Ma, C. Xu, S. Shen, F. Gao IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2023 Paper / Video / Code 
A trajectory planner based on differential flatness for car-like robot. |
|
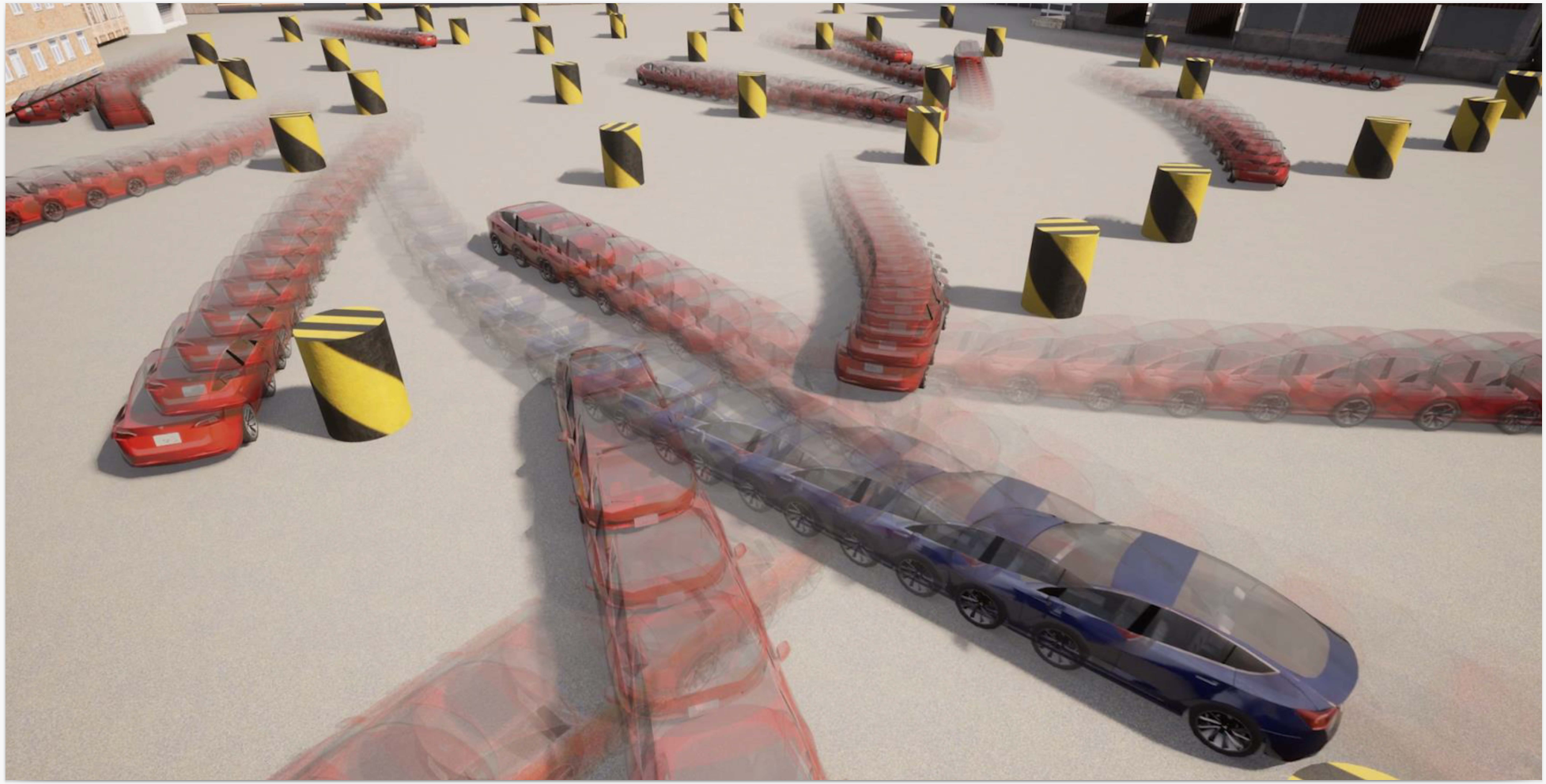
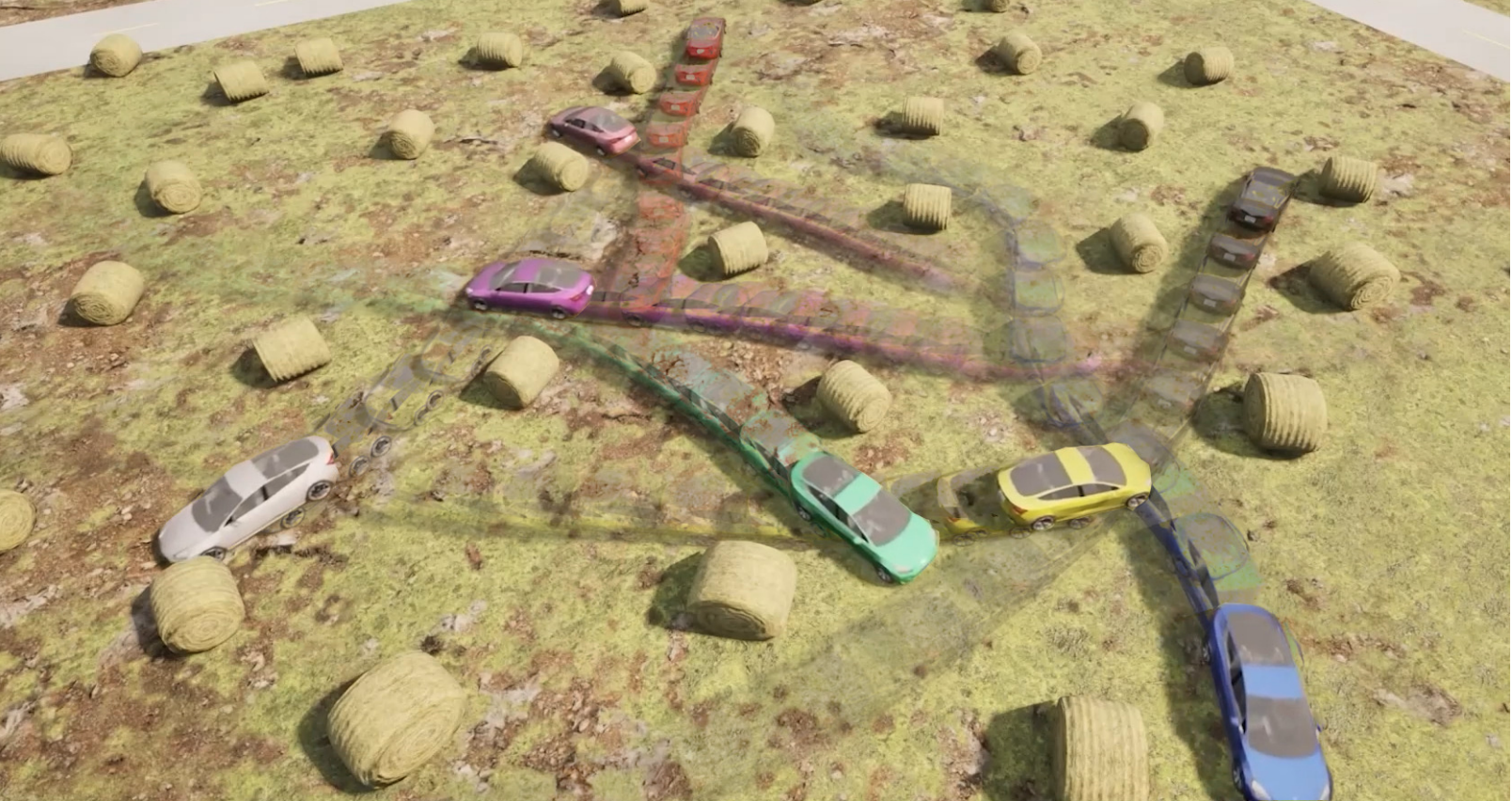
Decentralized Planning for Car-Like Robotic Swarm in Cluttered Environments
C. Ma, Z. Han, T. Zhang, J. Wang, L. Xu, C. Li, C. Xu, F. Gao IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 Paper / Video / Code 
A trajectory planner for car-like robots swarm. |
|
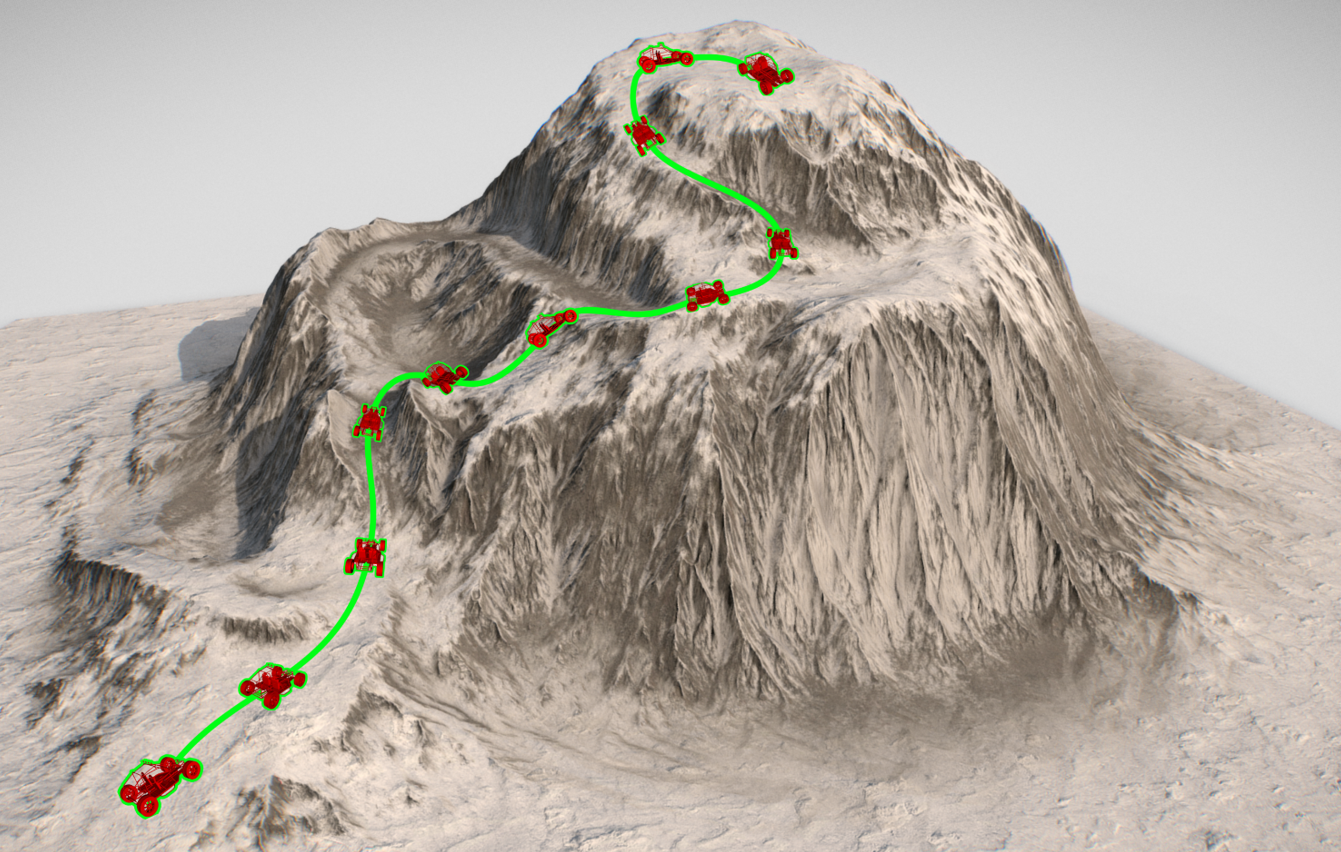
An Efficient Trajectory Planner for Car-like Robots on Uneven Terrain
L. Xu, K. Chai, Z. Han, H. Liu, C. Xu, Y. Cao, F. Gao IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 Paper / Video / Code 
A trajectory planner for car-like robots on uneven terrain. |
|
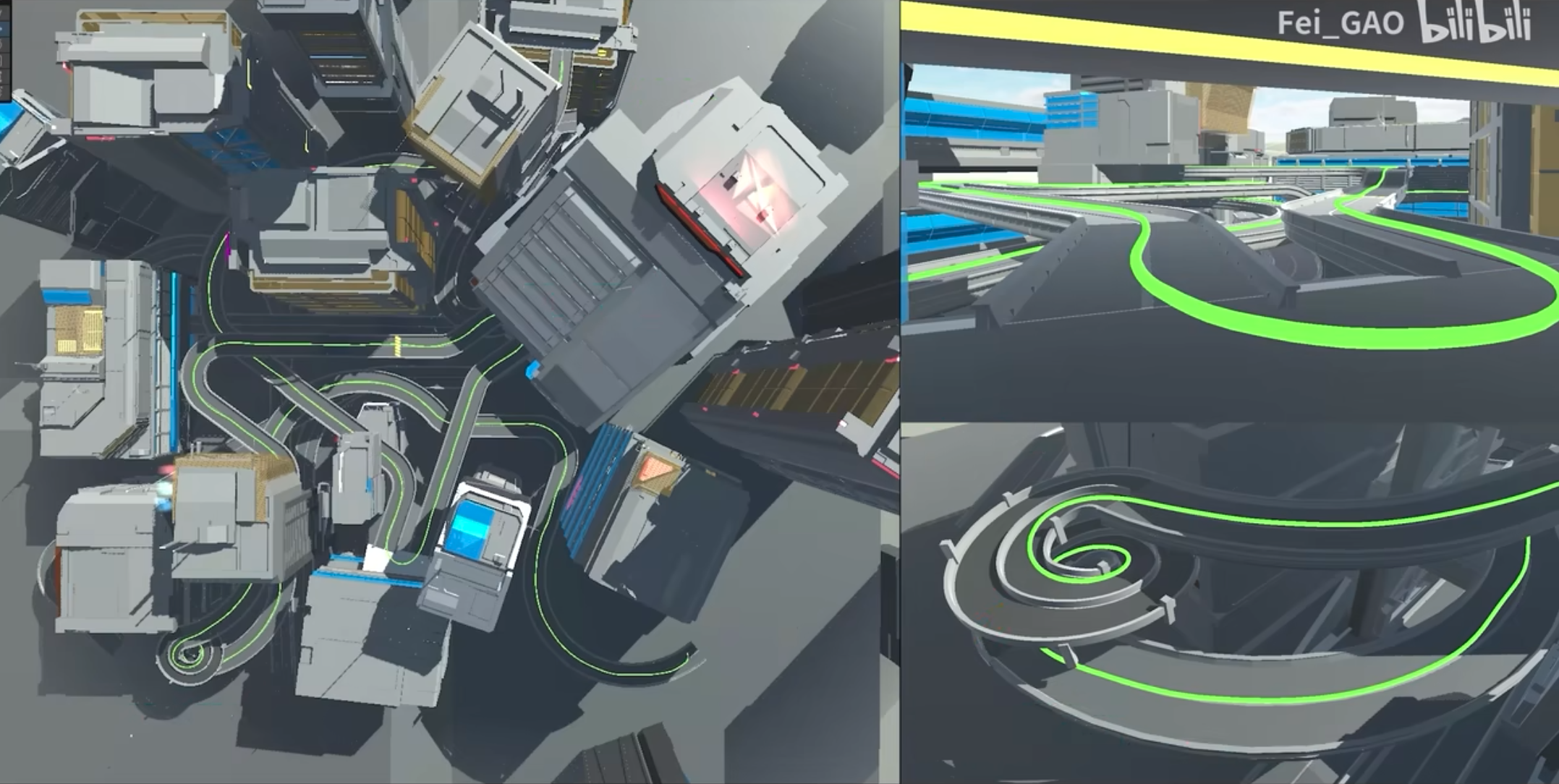
Towards Efficient Trajectory Generation for Ground Robots beyond 2D Environment
J. Wang†, L. Xu†, H. Fu, Z. Meng, C. Xu, Y. Cao, X. Lyu, F. Gao IEEE International Conference on Robotics and Automation (ICRA), 2023 Paper / Video / Code 
A trajectory planner for ground robots beyond 2D environment. |
